
本文是三篇系列文章中的第一篇。每篇文章都将涵盖 map 的不同部分。我建议你按顺序阅读。
Go 提供的内置类型 `map` 是使用[哈希表](https://en.wikipedia.org/wiki/Hash_table) 实现的。在本文中,我们将探讨这个哈希表的不同部分的具体实现:桶(存储键值对的数据结构),哈希(键值对的索引),负载因子(判断 map 是否应该扩容的指标)。
## 桶
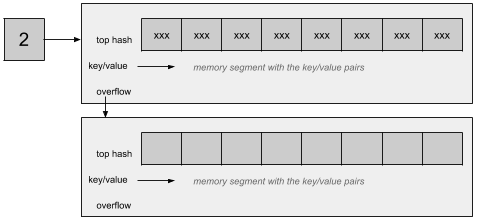
Go 将键值对存储在桶的列表中,每个桶容纳 8 个键值对,当 map 的容量耗尽,哈希桶的数量将会翻倍。下面是持有 4 个桶的 map 的粗略示图:
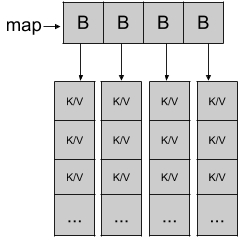
在下一篇文章中,我们将看到这些键值对是如何在桶里存储的。如果 map 再一次扩容,桶的数量将会翻倍,依次增加到 8,16,等等。
当一个键值对存入 map,它将根据键计算出的哈希值,被分配到一个桶里。
## 哈希
当一个键值对被存放到 map 中,Go 会根据它的键生成哈希值。
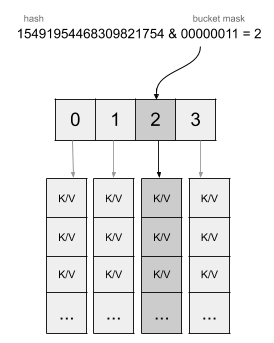
让我们以键值对 `"foo" = 1` 的插入作为例子。生成的哈希值可能是 `15491954468309821754`。该值将应用于位操作,掩码对应于桶的数量减 1。在我们的 4 个桶的例子中,掩码是 3,位操作如下:
哈希值不仅用于值在桶中的分配,还参与其他的操作。每个桶都将其哈希值的首字节存储在一个内部数组中,这使得 Go 可以对键进行索引,并跟踪桶中的空槽。让我们看一下二进制表示下,哈希的例子:
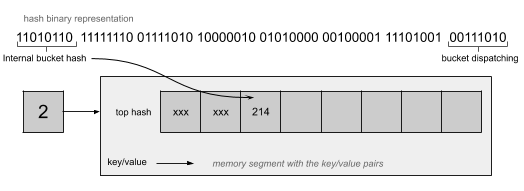
多亏了桶内部被称为 *top hash* 的表,Go 可以在数据访问期间使用它们与请求键的哈希值进行比较。
根据我们在程序中对 map 的使用,Go 需要对 map 进行扩容,以便管理更多的键值对。
## Map 扩容
在存储键值对时,桶会将它存储在 8 个可用的插槽中。如果这些插槽全部不可用,Go 会创建一个溢出桶,并于当前桶连接。
这个 `overflow` 属性表明了桶的内部结构。然而,增加溢出桶会降低 map 的性能。作为弥补,Go 将会分配新的桶(当前桶的数量的两倍),保存一个旧桶和新桶之间的连接,逐步将旧桶迁移到新桶中。实际上,在这次新的分配之后,每个参与过写操作的桶,如果操作还未完成,都将被迁移。被迁移的桶中的所有键值对都将被重新分配到新桶中,这意味着,先前同一个桶中存储在一起的键值对,现在可能被分配到不同的桶中。
Go 使用负载因子来判断何时开始分配新桶并迁移旧桶。
## 负载因子
Go 在 map 中使用 6.5 作为负载因子。你可以在代码中看到与负载因子相关的研究:
```go
// Picking loadFactor: too large and we have lots of overflow
// buckets, too small and we waste a lot of space. I wrote
// a simple program to check some stats for different loads:
// (64-bit, 8 byte keys and values)
// loadFactor %overflow bytes/entry hitprobe missprobe
// 4.00 2.13 20.77 3.00 4.00
// 4.50 4.05 17.30 3.25 4.50
// 5.00 6.85 14.77 3.50 5.00
// 5.50 10.55 12.94 3.75 5.50
// 6.00 15.27 11.67 4.00 6.00
// 6.50 20.90 10.79 4.25 6.50
// 7.00 27.14 10.15 4.50 7.00
// 7.50 34.03 9.73 4.75 7.50
// 8.00 41.10 9.40 5.00 8.00
//
// %overflow = percentage of buckets which have an overflow bucket
// bytes/entry = overhead bytes used per key/value pair
// hitprobe = # of entries to check when looking up a present key
// missprobe = # of entries to check when looking up an absent key
```
如果桶中键值对的平均容量超过 6.5,map 将会扩容。考虑到基于键的哈希值的分配并不均匀,正如我们在以上研究中看到的,使用 8 作为负载因子会导致大量的溢出桶。
这个系列的下一篇文章,["Go: 通过源码研究 Map 的设计"](https://studygolang.com/articles/22777),将会讲解 map 的内部实现。
via: https://medium.com/@blanchon.vincent/go-map-design-by-example-part-i-3f78a064a352
作者:blanchon.vincent 译者:DoubleLuck 校对:polaris1119
本文由 GCTT 原创翻译,Go语言中文网 首发。也想加入译者行列,为开源做一些自己的贡献么?欢迎加入 GCTT!
翻译工作和译文发表仅用于学习和交流目的,翻译工作遵照 CC-BY-NC-SA 协议规定,如果我们的工作有侵犯到您的权益,请及时联系我们。
欢迎遵照 CC-BY-NC-SA 协议规定 转载,敬请在正文中标注并保留原文/译文链接和作者/译者等信息。
文章仅代表作者的知识和看法,如有不同观点,请楼下排队吐槽
有疑问加站长微信联系(非本文作者))





